Inquire: Call 0086-755-23203480, or reach out via the form below/your sales contact to discuss our design, manufacturing, and assembly capabilities.
Quote: Email your PCB files to Sales@pcbsync.com (Preferred for large files) or submit online. We will contact you promptly. Please ensure your email is correct.
Notes: For PCB fabrication, we require PCB design file in Gerber RS-274X format (most preferred), *.PCB/DDB (Protel, inform your program version) format or *.BRD (Eagle) format. For PCB assembly, we require PCB design file in above mentioned format, drilling file and BOM. Click to download BOM template To avoid file missing, please include all files into one folder and compress it into .zip or .rar format.
Xilinx Zynq-7000 SoC: ARM + FPGA Complete Beginner Guide
If you’ve been designing embedded systems for any length of time, you’ve probably hit that wall where a standalone microcontroller just doesn’t cut it anymore. Maybe you need real-time signal processing alongside your control logic, or perhaps your image processing pipeline demands hardware acceleration that software alone can’t deliver. That’s exactly where the Xilinx Zynq-7000 SoC enters the picture, and honestly, it changed how I approach complex embedded designs.
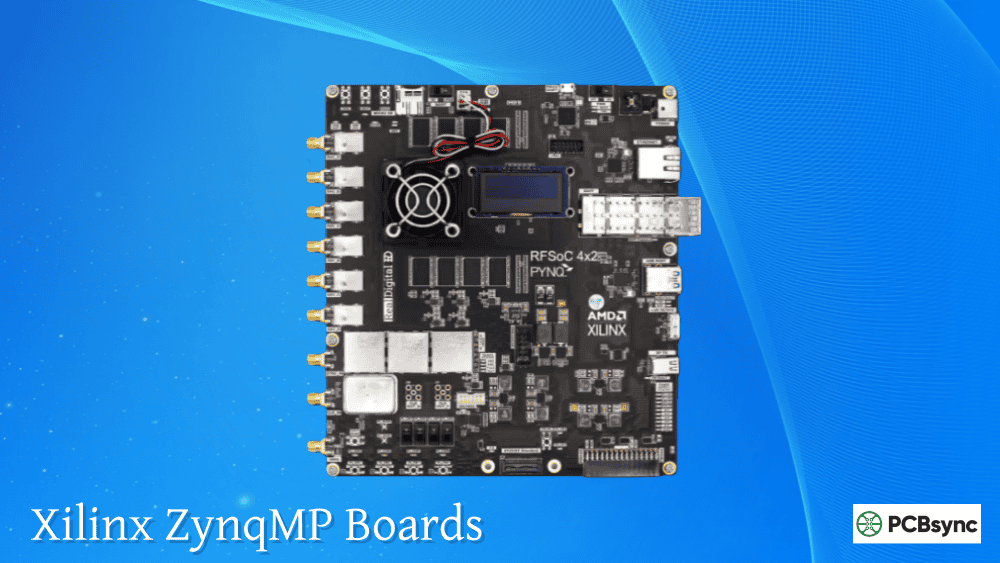
The Zynq platform represents something genuinely different in the embedded world. Rather than bolting an FPGA next to a processor on your PCB (with all the routing headaches that entails), AMD/Xilinx put both on the same silicon. The result? A Zynq SoC that lets you run Linux on dual ARM Cortex-A9 cores while simultaneously implementing custom hardware accelerators in programmable logic, all communicating through on-chip interconnects with bandwidth that would be impossible to achieve across a PCB.
In this guide, I’ll walk you through everything you need to know about the Zynq 7000 family, from architecture fundamentals to selecting development boards and understanding what it takes to design a custom PCB around these devices.
The Xilinx Zynq-7000 SoC (now under AMD following their acquisition) is a true System-on-Chip that integrates a feature-rich dual-core or single-core ARM Cortex-A9 Processing System (PS) with AMD’s 7-series programmable logic (PL) on a single device. This isn’t just an FPGA with a soft processor instantiated in fabric, the ARM cores are hardened silicon with dedicated cache, memory controllers, and peripherals.
What makes the Zynq 7000 SoC architecture compelling is the tight integration between the PS and PL sections. Over 3,000 interconnects link these domains, providing up to 100 Gb/s of on-chip bandwidth. That’s an order of magnitude better than what you’d achieve routing signals between discrete components on a PCB, and it fundamentally changes what’s possible in terms of hardware/software partitioning.
Key Differentiators of Zynq Architecture
The Zynq SoC approach differs from traditional FPGA designs in several important ways:
Processing System Always Boots First: Unlike pure FPGAs where you’re configuring the entire device from external flash, the Zynq-7000 PS boots from its internal BootROM and can run standalone without ever touching the programmable logic. This means you can develop and debug software while your hardware engineer is still working on the PL design.
Hardened Peripherals: USB, Ethernet, UART, SPI, I2C, CAN, GPIO, and DDR memory controllers are all implemented in dedicated silicon within the PS. You’re not burning FPGA resources on these standard interfaces.
Flexible Power Domains: The PS and PL sit on separate power domains. You can literally power down the FPGA fabric entirely while the ARM cores continue running, which is huge for power-sensitive applications.
Zynq 7000 Architecture Deep Dive
Understanding the Zynq 7000 architecture is essential before you start designing. Let me break down the major blocks.
Processing System (PS) Components
The PS in Xilinx Zynq devices contains:
Application Processing Unit (APU): Dual ARM Cortex-A9 MPCore processors running at up to 1 GHz (device dependent). Each core includes:
32 KB L1 instruction cache
32 KB L1 data cache
512 KB shared L2 cache
NEON media processing engine for SIMD operations
Hardware floating-point units
Memory Interfaces:
DDR3/DDR3L/DDR2/LPDDR2 memory controller supporting up to 1 GB address space
256 KB On-Chip Memory (OCM) for low-latency access
Quad-SPI flash controller
NAND flash controller
Static memory controller for NOR flash and SRAM
Peripheral Controllers: Two USB 2.0 OTG controllers, two Gigabit Ethernet MACs, two SD/SDIO controllers, two full CAN 2.0B controllers, two SPI controllers, two I2C controllers, two UARTs, up to 54 GPIO on MIO pins.
Programmable Logic (PL) Resources
The PL portion uses AMD’s 7-series FPGA architecture (Artix-7 or Kintex-7 class depending on the device variant). Available resources include:
Device
Logic Cells
Block RAM
DSP Slices
Max I/O
Transceivers
Z-7007S
23K
1.8 Mb
66
100
0
Z-7010
28K
2.1 Mb
80
100
0
Z-7012S
55K
2.5 Mb
120
150
4
Z-7014S
65K
3.8 Mb
170
200
0
Z-7015
74K
3.3 Mb
160
150
4
Z-7020
85K
4.9 Mb
220
200
0
Z-7030
125K
9.3 Mb
400
250
4
Z-7035
275K
17.6 Mb
900
362
8
Z-7045
350K
19.1 Mb
900
362
8
Z-7100
444K
26.5 Mb
2,020
400
16
The “S” suffix devices (Z-7007S, Z-7012S, Z-7014S) are single-core variants designed for cost-sensitive applications while maintaining the Zynq platform’s fundamental capabilities.
The interface between PS and PL is where the Zynq-7000 SoC architecture really shines. Available interconnect ports include:
High-Performance AXI Ports (HP0-HP3): Four 64-bit or 32-bit slave interfaces providing PL masters direct access to DDR and OCM memory. These are your workhorses for high-bandwidth data movement.
Accelerator Coherency Port (ACP): 64-bit slave interface providing cache-coherent access from PL to the ARM memory system. Essential when your hardware accelerators need to share data structures with software without explicit cache management.
General Purpose Ports (GP0-GP1): Two 32-bit master interfaces and two 32-bit slave interfaces for lower-bandwidth control plane traffic.
Zynq 7000 Development Boards Comparison
Choosing the right development board is crucial for prototyping Zynq designs. Here’s a comparison of popular options:
Board
Zynq Device
Price Range
Key Features
Best For
PYNQ-Z2
XC7Z020
~$200
Python productivity, audio, HDMI, Arduino headers
Education, rapid prototyping
Arty Z7-20
XC7Z020
~$199
Compact, Pmod connectors, HDMI
Cost-effective development
ZedBoard
XC7Z020
~$400
FMC, OLED, audio, VGA/HDMI
All-around development
Zybo Z7-20
XC7Z020
~$299
MIPI CSI-2 Pcam, HDMI in/out
Embedded vision
ZC702
XC7Z020
~$900
FMC HPC/LPC, PCIe, extensive I/O
Production-ready prototyping
ZC706
XC7Z045
~$2,500
High-end device, GTX transceivers
High-performance applications
MicroZed
XC7Z010/020
~$178
SoM format, carrier boards available
Custom carrier development
Selecting Your First Zynq Board
For beginners, I typically recommend starting with either the PYNQ-Z2 or Arty Z7. The PYNQ platform adds a Python-based productivity layer that lets you experiment with hardware/software integration without immediately diving into HDL. You can literally control FPGA overlays from Jupyter notebooks, which dramatically flattens the learning curve.
If you’re more comfortable with traditional FPGA workflows and want maximum flexibility, the ZedBoard remains an excellent choice despite being an older design. The dual FMC connectors and extensive peripheral complement give you room to explore virtually any application domain.
For engineers evaluating Zynq for a production design, the official ZC702 evaluation kit makes sense despite its higher cost. It’s the reference platform Xilinx/AMD uses for their documentation and example designs, so you’ll encounter fewer compatibility issues working through tutorials.
Understanding the Zynq Boot Process
One aspect of the Zynq-7000 SoC that trips up many newcomers is the boot sequence. Unlike pure FPGAs where configuration happens through dedicated pins, the Zynq follows a processor-centric boot model.
Boot Sequence Overview
The boot process follows these stages:
Stage 0 – BootROM: Upon power-up or reset, the internal BootROM executes on CPU 0 while CPU 1 enters a wait-for-event state. The BootROM reads boot mode pins to determine the primary boot device (QSPI, SD, NAND, NOR, or JTAG), then copies the First Stage Bootloader to On-Chip Memory.
Stage 1 – FSBL: The First Stage Bootloader handles critical system initialization:
PS clock configuration and PLL setup
DDR memory controller initialization
FPGA bitstream programming (optional)
Loading and handoff to second stage (U-Boot or application)
Stage 2 – U-Boot or Application: For Linux systems, U-Boot typically loads the kernel, device tree, and root filesystem. For bare-metal applications, your code takes over directly from FSBL.
Boot Mode Selection
The Zynq determines boot source through dedicated mode pins sampled at reset:
Boot Mode
MIO[5:2]
Description
JTAG
0000
Development/debug mode
Quad-SPI
0001
QSPI flash boot (most common)
NAND
0010
NAND flash boot
NOR
0100
Parallel NOR flash
SD Card
0101
SD/SDIO boot
Most development boards use DIP switches or jumpers to select boot mode, making it easy to switch between SD card (for development) and QSPI (for production).
Creating Boot Images
The Vivado/Vitis toolchain generates BOOT.BIN files that package FSBL, bitstream, and application code. A typical boot image for a Linux system includes:
FSBL.elf – First Stage Bootloader
design_wrapper.bit – FPGA bitstream (optional)
u-boot.elf – Second stage bootloader
system.dtb – Device tree blob
image.ub – Linux kernel and initramfs
The bootgen utility stitches these components according to a BIF (Boot Image Format) specification file.
Real-World Applications for Zynq SoC
The Xilinx Zynq 7000 family has found its way into an impressive range of applications. Here’s where I’ve seen these devices deployed successfully:
Industrial Motor Control and Automation
The combination of real-time processing capability and reconfigurable I/O makes Zynq ideal for motor control applications. You can implement multiple PWM channels with precise timing in the PL while running higher-level motion planning algorithms on the ARM cores. The hardened CAN controllers handle industrial networking without consuming FPGA resources.
Embedded Vision Systems
Multi-camera driver assistance systems and industrial inspection equipment benefit enormously from the Zynq-7000 SoC architecture. Image sensor interfaces and pixel processing pipelines run in the PL at wire speed, while the PS handles object detection algorithms, system management, and network communication.
Software-Defined Radio
The Zynq platform has become a go-to choice for SDR implementations. ADC/DAC interfaces and baseband processing live in the PL, ARM cores handle protocol stacks and user interfaces, and the high-bandwidth PS-PL interconnects keep data flowing.
Test and Measurement
Companies like Tektronix use Zynq 7000 devices in their test equipment. The FPGA fabric handles high-speed signal acquisition and triggering while the processor system runs analysis software and user interfaces.
Medical Imaging
Ultrasound systems, endoscopes, and other medical imaging equipment leverage Zynq SoC for real-time image processing and display.
Based on years of working with the Zynq platform, here are the issues that catch people most often:
Challenge 1: PS-PL Clock Domain Crossing
When passing data between PS software and PL hardware, clock domain mismatches can cause subtle bugs. The PS operates on its own clock tree while PL can use completely different clock frequencies. Always use proper synchronization primitives (FIFOs, CDC cells) at the PS-PL boundary.
Challenge 2: AXI Protocol Errors
AXI is more complex than simpler bus protocols. Common mistakes include:
Not properly handling BRESP/RRESP signals
Violating transaction ordering requirements
Incorrect burst length or size encoding
Failing to complete transactions properly
The AXI Verification IP (VIP) available in Vivado can help debug protocol violations during simulation.
Challenge 3: DDR Calibration Failures
If DDR fails to calibrate during boot, your board won’t work. Common causes include:
Incorrect termination resistor values
Excessive length mismatch between signals
Power supply noise affecting Vref
Incorrect ODT settings in PS configuration
The Vivado Memory Interface Generator provides calibration status registers you can read via JTAG to diagnose failures.
Challenge 4: Linux Driver Development
Writing Linux drivers for PL peripherals requires understanding both the Linux driver model and your hardware interface. For simple register-based peripherals, the UIO (Userspace I/O) framework provides an easier path than kernel-space drivers. Reserve the complexity of proper kernel drivers for high-performance applications requiring interrupt handling or DMA.
When issues span the PS-PL boundary, debugging becomes tricky. Helpful techniques include:
ILA (Integrated Logic Analyzer) cores in PL to capture hardware signals
System ILA for monitoring AXI transactions
ARM DS-5 or Vitis debugger for software debugging
Printf debugging via UART for quick checks
Hardware breakpoints in processor debug mode
Getting Started with Zynq Development
The Xilinx Zynq development ecosystem centers around a few key tools:
Vivado Design Suite
Vivado handles all hardware aspects of Zynq design, including PS configuration, PL logic design, synthesis, implementation, and bitstream generation. The free WebPACK license covers smaller devices including the popular XC7Z010 and XC7Z020 used in most development boards.
The IP Integrator (IPI) block design flow is particularly relevant for Zynq-7000 development. You instantiate the ZYNQ7 Processing System IP block, configure it for your target board, and connect custom PL logic through the AXI interfaces.
Vitis Unified Software Platform
Vitis replaced the older Xilinx SDK and handles software development for the ARM cores. It includes bare-metal drivers for all PS peripherals, a first-stage bootloader (FSBL) generator, and debugging capabilities. You can target standalone (bare-metal), FreeRTOS, or Linux applications.
PetaLinux Tools
For Linux-based Zynq designs, PetaLinux provides a complete build system based on Yocto/OpenEmbedded. It generates bootloaders, kernel images, device trees, and root filesystems configured for Xilinx devices. Board Support Packages (BSPs) for official development boards simplify initial bring-up.
Development Workflow
A typical Zynq 7000 development workflow looks like:
Software Development in Vitis: Create platform project from XSA, develop application software
System Integration: Generate boot images, test on hardware
Linux Development (if applicable): Build custom Linux distribution with PetaLinux
Step-by-Step First Project
Let me walk through creating your first Zynq project, as this practical knowledge is invaluable:
Creating the Hardware Design:
Launch Vivado and create a new RTL project targeting your board
Create a new Block Design using IP Integrator
Add the ZYNQ7 Processing System IP to the block design
Run Block Automation to configure PS for your target board preset
Double-click the PS block to customize peripherals (enable UART, GPIO, etc.)
Connect any PL logic to appropriate AXI interfaces
Validate design, create HDL wrapper, run synthesis and implementation
Export hardware including bitstream (File → Export → Export Hardware)
Creating the Software Application:
Launch Vitis and select your workspace directory
Create new Platform Project using exported XSA file
Build the platform to generate BSP and FSBL
Create new Application Project (Hello World is a good start)
Select your platform and target processor (ps7_cortexa9_0)
Build and debug using JTAG connection
The whole process takes maybe 30 minutes once you’re familiar with the tools. The first time through, budget a few hours for exploration and troubleshooting.
Understanding the PS-PL Interface in Practice
Working with the PS-PL interface is where Zynq really shines. Here’s how to think about the different connection options:
AXI GP (General Purpose) Ports: Use these for register-based control of PL peripherals. Memory-mapped registers let your ARM code configure and communicate with custom hardware blocks. Data rates are adequate for control traffic but not optimal for bulk transfers.
AXI HP (High Performance) Ports: When your PL logic needs to move large amounts of data to or from DDR memory, HP ports are your workhorses. They support burst transactions and provide direct memory access without passing through the CPU.
AXI ACP (Accelerator Coherency Port): This specialized port maintains cache coherency between PL and PS. Use it when PL-side accelerators need to share data structures with software without explicit cache flush/invalidate operations. The tradeoff is potentially higher latency compared to HP ports.
PCB Design Considerations for Zynq-7000
Having designed several custom boards around Zynq devices, here are the critical considerations:
Power Distribution System
The Zynq-7000 SoC requires multiple power rails with specific sequencing requirements:
Supply Rail
Typical Voltage
Description
VCCINT
1.0V
Core logic (PS and PL)
VCCAUX
1.8V
Auxiliary circuits
VCCBRAM
1.0V
Block RAM
VCCO_MIO
1.8V/2.5V/3.3V
PS MIO bank power
VCCO_PLx
1.2V-3.3V
PL I/O bank power
VCCPLL
1.8V
PLL power
PS_DDR
Device dependent
DDR interface power
Power sequencing follows a specific order: VCCINT must be stable before VCCAUX, and both must be valid before VCCO rails. The AMD Power Design Manager (XPE) tool helps estimate power consumption and validate your power architecture.
Decoupling Strategy
Per AMD’s UG933 PCB Design Guide, Zynq devices require significant decoupling capacitance. The processing system alone needs multiple bulk capacitors (47µF-100µF) plus numerous 0.47µF and 4.7µF ceramics distributed across supply pins.
Key guidelines from my experience:
Place 0402 ceramics as close to BGA balls as possible
Use multiple vias per capacitor pad to reduce parasitic inductance
Don’t skimp on the capacitor count, stability issues are extremely difficult to debug
Keep power and ground planes as close to the device side of the PCB as practical
DDR3 Layout
The PS DDR interface requires careful impedance-controlled routing:
Data signals: 40Ω single-ended
Address/command: 40Ω
Clock: 80Ω differential
Match data byte group lengths within 5 mils
Match address/command to clock within 25 mils
The Vivado Memory Interface Generator (MIG) can adjust timing parameters to compensate for moderate length mismatches, but you’re making calibration work harder than necessary.
High-Speed Signals
If you’re using FPGA transceivers (available on Z-7015, Z-7030, Z-7035, Z-7045, Z-7100), follow standard multi-gigabit design practices:
AC coupling capacitors placed adjacent to transmit pins
Continuous ground reference plane under differential pairs
For a cost-effective 8-layer stack-up targeting Zynq-7000 designs, consider:
Layer
Function
Material
L1
Signals (component side)
Copper
L2
Ground plane
Copper
L3
Power plane (VCCINT)
Copper
L4
Signals
Copper
L5
Signals
Copper
L6
Power plane (multiple rails)
Copper
L7
Ground plane
Copper
L8
Signals (solder side)
Copper
Larger devices like the Z-7045 or Z-7100 in BGA packages typically warrant 10-12 layer boards for proper signal escape and power integrity. The smaller CLG400 package devices (Z-7010, Z-7020) are manageable on 6-layer boards with careful planning.
Thermal Management
Zynq devices can dissipate significant power depending on PL utilization and clock speeds. Plan thermal management early:
Calculate expected power using AMD’s Power Design Manager (XPE)
Ensure adequate copper pour area on top and bottom layers connected to device thermal pad
Consider heat sink attachment for high-performance applications
Industrial temperature variants (-40°C to +100°C) are available for demanding environments
A common mistake is underestimating PL power consumption during prototyping. Your final production design might use significantly more FPGA resources than early development, so design thermal capacity with growth margin.
Design Review Checklist
Before releasing your Zynq-7000 PCB design, verify:
[ ] All power rails meet voltage tolerance specifications
[ ] Power sequencing follows device requirements
[ ] Decoupling capacitors meet quantity and placement guidelines per UG933
[ ] DDR interface impedance and length matching within specifications
[ ] Boot mode pins have proper pull-ups/pull-downs for intended configuration
[ ] JTAG interface accessible for debug
[ ] PS_CLK oscillator properly specified and routed
The Zynq Book (Free PDF): https://www.zynqbook.com/
AMD Wiki Getting Started: https://xilinx-wiki.atlassian.net/wiki/spaces/A/pages/189530183/Zynq-7000
Community Resources
AMD Community Forums: Active community support for Zynq development questions
Digilent Forum: Board-specific discussions for Digilent Zynq boards
GitHub: Numerous open-source Zynq projects and reference designs
Zynq vs. Zynq UltraScale+ — When to Upgrade
The Zynq-7000 family remains excellent for many applications, but AMD’s newer Zynq UltraScale+ MPSoC offers significant improvements:
Feature
Zynq-7000
Zynq UltraScale+
Application Processor
Dual Cortex-A9 @ 1 GHz
Quad Cortex-A53 @ 1.5 GHz
Real-time Processor
None
Dual Cortex-R5
GPU
None
Mali-400 MP2
FPGA Fabric
7-series (28nm)
UltraScale (16nm)
Max Transceivers
16
16 (GTH 16.3 Gb/s)
Security
AES-256, SHA
Enhanced with PUF
For new designs with demanding performance requirements, the UltraScale+ family is worth evaluating. However, Zynq-7000 remains more cost-effective for volume production and has a larger ecosystem of reference designs and community support.
Frequently Asked Questions
Can I run Linux on Zynq-7000?
Yes, running Linux on Zynq is fully supported and quite common. The dual Cortex-A9 cores with MMU are well-suited for Linux. PetaLinux tools provide a straightforward path to building custom Linux distributions, and you can boot from SD card, QSPI flash, or NAND. The PL remains fully functional while Linux runs on the PS, allowing hardware accelerators to work alongside software applications.
What’s the difference between Zynq-7000 and Zynq-7000S?
The Zynq-7000S variants (Z-7007S, Z-7012S, Z-7014S) feature single-core ARM Cortex-A9 processors instead of dual-core. They’re optimized for cost-sensitive applications where the second CPU core isn’t needed. The PL resources and PS peripherals remain comparable to their dual-core counterparts, making them excellent choices for motor control, industrial IoT, and embedded vision applications where software requirements are modest.
How much does Zynq development cost to get started?
You can start Zynq development for under $200 with boards like the Arty Z7 or PYNQ-Z2. The Vivado WebPACK license is free and covers these devices. If your application requires larger devices like the Z-7030 or Z-7045, you’ll need a paid Vivado license and higher-cost development hardware. Total cost of entry compares favorably to many competing platforms.
Can Zynq-7000 boot without programming the FPGA?
Yes, absolutely. The Zynq-7000 PS boots from internal BootROM and can execute software entirely independent of the PL. You can develop and test ARM software without having any FPGA bitstream. The PL only needs programming when your application uses custom logic in the FPGA fabric or routes PS peripherals through EMIO pins to PL-side I/O.
What operating systems besides Linux run on Zynq?
The Zynq ARM cores support numerous operating systems including FreeRTOS (very popular for bare-metal RTOS applications), VxWorks, QNX, Android, and Windows Embedded Compact. For simple applications, standalone (no OS) development is also fully supported with Xilinx’s bare-metal drivers. The choice depends on your real-time requirements, software ecosystem needs, and licensing considerations.
Wrapping Up
The Xilinx Zynq-7000 SoC family represents a mature and well-supported platform for designs requiring both processor flexibility and FPGA-based hardware acceleration. After working with these devices across multiple projects, I can confidently say the architecture delivers on its promise of simplifying complex embedded systems.
Whether you’re building industrial automation equipment, embedded vision systems, or custom test instruments, the Zynq platform gives you the tools to partition your design optimally between hardware and software. The learning curve is real, especially if you’re coming from a pure software or pure FPGA background, but the documentation and community resources have never been better.
Start with a development board, work through the official tutorials, and don’t hesitate to leverage the extensive example designs. The investment in learning this platform pays dividends across a remarkably wide range of applications.
Inquire: Call 0086-755-23203480, or reach out via the form below/your sales contact to discuss our design, manufacturing, and assembly capabilities.
Quote: Email your PCB files to Sales@pcbsync.com (Preferred for large files) or submit online. We will contact you promptly. Please ensure your email is correct.
Notes: For PCB fabrication, we require PCB design file in Gerber RS-274X format (most preferred), *.PCB/DDB (Protel, inform your program version) format or *.BRD (Eagle) format. For PCB assembly, we require PCB design file in above mentioned format, drilling file and BOM. Click to download BOM template To avoid file missing, please include all files into one folder and compress it into .zip or .rar format.









{kind=link}